Ręczny skaner iReal 2E (Scantech) do skanowania człowieka i obiektów z kolorem i teksturą.
Pomiar wraz z teksturami HD i kolorami 24 bit
Skanowanie 3D ludzi, wraz z twarzą i włosami
Bazowanie i łączenie pomiarów za pomocą punktów referencyjny, a także bez punktów referencyjnych, z wykorzystaniem cech szczególnych obiektu i koloru
pomiar niewidzialnym światłem podczerwonym o dużym obszarze
Wysoka dokładność pomiarowa, sięgająca 0.1 mm
Wysoka rozdzielczość, wynosząca do 0.2 mm
Duży obszar pomiarowy, wynoszący 480 mm × 550 mm
Nie wielkie wymiary i waga: 140x94x258mm, 850g
Ręczny skaner laserowy metrologiczny KScan Magic (Scantech) jest profesjonalnym narzędziem metrologicznym, którego dokładność pomiarowa pozwala na zastosowanie w przemysłowej kontroli jakości części od kilku milimetrów, do kilkunastu metrów.
Wysoka rozdzielczość, dokładność i płynna zmiana między laserami, zapewnia odwzorowanie najdrobniejszych szczegółów, a nowoczesna technologia digitalizacji eliminuje konieczność matowienia elementów połyskujących i czarnych.
W czasie rzeczywistym otrzymujemy wizualizację danych pomiarowych na ekranie monitora, a bezpośrednio na głowicy pomiarowej informację o optymalnej pozycji pomiarowej co sprawia, że skanowanie 3D nigdy nie było prostsze!
Collaborative robots, czyli coboty to roboty współpracujące bezpośrednio z człowiekiem. Roboty nie wymagają stosowania ogrodzenia ochronnego lub innych mechanicznych barier – mogą pracować bezpośrednio z człowiekiem.
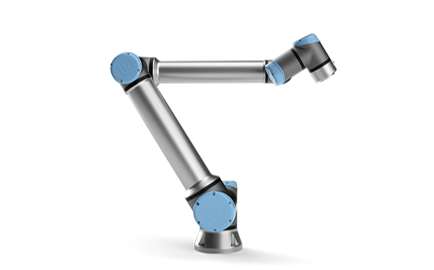
Universal Robots Cobot UR10
Robot współpracujący Cobot UR10 Universal Robots, to największy robot przemysłowy z rodziny Universal Robots. Udźwig do 10 kg pozwala mu na automatyzację procesów o większym obciążeniu, gdzie precyzja i niezawodność mają wciąż kluczowe znaczenie:
Udźwig do 10 kg
Zasięg 1300 mm
15 zaawansowanych funkcji bezpieczeństwa zapewnia wysoką precyzję
Szybki zwrot z inwestycji
Wszechstronny
Bezpieczny
Elastyczny Łatwe programowanie
Szybka instalacja Łatwo wymienne przeguby
Niezwykle wszechstronny i przenośny, lekki robot KINOVA Gen3 Ultra jest przełomowy, zbudowany od podstaw, aby sprostać zmieniającym się potrzebom akademickich i przemysłowych zespołów badawczych.
Został stworzony z myślą o interakcji człowiek-robot.
Jest to pierwszy robot z wbudowanymi dyskretnymi czujnikami 2D i 3D, idealny do sterowania robotem w oparciu o wizję.
Wbudowany kontroler w każdym siłowniku
Czujnik momentu obrotowego w każdym przegubie
Nieograniczone obroty stawów
Bezpieczeństwo
Kinova Gen3
2-palczasty chwytak Robotiq 2F-85
Chwytak Robotiq 2F-85 wyposażony w dwa palce, jest bardzo elastyczny oraz kompatybilny ze wszystkimi robotami przemysłowymi.
Przeznaczeniem chwytaka jest podnoszenie i przemieszczanie zarówno przedmiotów o niewielkich gabarytach jak i większych, o kształtach płaskim lub okrągłym i zróżnicowanej wadze. Chwytanie przedmiotów odbywa się poprzez uchwyt zewnętrzny lub wewnętrzny.
Chwytak ma ergonomiczny kształt oraz jest łatwy do zaprogramowania za pomocą intuicyjnego interfejsu. Wyposażony w automatyczne wykrywanie detali oraz sprzężenie zwrotne pozycji.
Chwytak przeznaczony do robotów UR oraz do zastosowań przemysłowych, doskonale sprawdza się w przypadku robotów współpracujących, sprzyjając automatyzacji procesów produkcyjnych. Jego zaletą jest też bardzo szybki montaż.
Onrobot RG2 – ELASTYCZNY CHWYTAK Z DWOMA PALCAMI O DUŻYM POSUWIE
Elastyczne chwytaki mogą być wykorzystywane do pracy z elementami o rozmaitych rozmiarach i kształtach.
Projekt oparty o założenia plug and produce skraca czas rozpoczęcia procesów na produkcji z jednego dnia do jednej godziny.
Z chwytaka można korzystać zaraz po wyjęciu go z opakowania, co pozwala skrócić czas potrzebny na programowanie nawet o 70%.
Chwytak Onrobot RG2
chwytak trójpalcowy Onrobot 3FG15
Onrobot 3FG15 – ELASTYCZNY CHWYTAK 3-PALCOWY O DUŻYM POSUWIE
Elastyczna produkcja – duży posuw optymalizuje dozorowanie tokarek CNC produkujących części o różnych rozmiarach przy zastosowaniu jednego chwytaka z 3 palcami. Precyzyjne umiejscowienie w punkcie centralnym podwyższa jakość, spójność i wydajność przy minimalnym programowaniu. Mocny, stabilny chwyt dzięki 3 punktom kontaktu sprawia, że chwytak można w prosty i szybki sposób ponownie wdrażać w ramach wielu procesów.