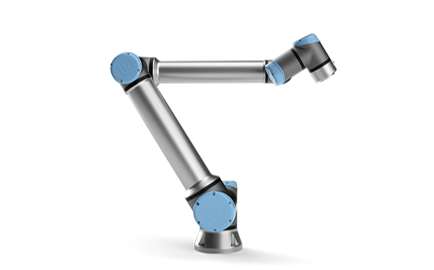
Equipped with two fingers, the Robotiq 2F-85 gripper is highly flexible and compatible with all industrial robots.
The purpose of the gripper is to lift and move both small and larger objects, with flat or round shapes and varying weights. Workpieces are gripped by means of an external or internal handle.
The gripper has an ergonomic design and is easy to program via an intuitive interface. Equipped with automatic workpiece detection and position feedback.
Designed for UR robots and industrial applications, the gripper is ideal for collaborative robots, favouring the automation of production processes. It also has the advantage of very fast assembly.